El controlador de motor sirve para regular la potencia del coche y para cambiar el sentido de giro del coche.

En esta imagen vienen indicadas cuales son las conexiones del controlador de motor - L298N.

Y en esta otra foto vienen indicadas donde se tienen que conectar los cables entre el controlador de motor y la placa arduino.
El Jumper --- ENA y ENB:
· Son los encargados de controlar la velocidad del coche y también controlan el encendido y apagado del coche.
El IN 1,2,3,4:
·
Sirven para controlar el giro de las ruedas del coche.

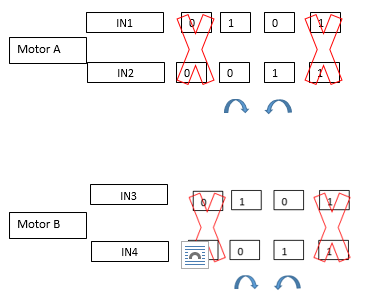
En esta imagen vienen indicados que pines hay que indicar para que las ruedas del coche giren correctamente.
En primer lugar, en el motor A, en el IN 1 hay que indicar el pin 1 y en el IN 2 hay que indicar el pin 0 para que el coche gire hacia la derecha, en cambio para que el coche gire a la izquierda en el IN 1 hay que indicar el pin 0 y en el IN 2 hay que indicar el pin 1.
En segundo lugar, en el motor B, en el IN 3 hay que indicar el pin 1 y en el IN 4 hay que indicar el pin 0 para que el coche gire hacia la derecha, en cambio para que el coche gire a la izquierda en el IN 3 hay que indicar el pin 0 y en el IN 4 hay que indicar el pin 1.
Esta es la 2º parte de la práctica. En https://blogsomuelhidalgoeh.blogspot.com.es se puede ver la 1º parte de la práctica. Y en https://blogeroma.blogspot.com se puede ver la 3º parte de la práctica.
No hay comentarios:
Publicar un comentario